


In order to overcome the problem of ‘urban canyons’ distorting the accuracy of GPS, the team at New York City Department of Transportation (NYCDOT) involved in its Connected Vehicle Pilot Program are using an enhanced vehicle-to-everything (V2X)-locate positioning engine – and now they’ve found a way to verify this location information.

Locations are derived from the Geographic Positioning System (GPS) in CV devices. Signals are measured from sufficient satellites to define a user’s location within a calculated dilution of precision (DOP). In the City’s urban canyons, there are fewer satellites visible due to the tall buildings, causing the GPS signal at ground level to be degraded or lost, either through satellite signals being obscured or through signals bouncing off surroundings and forming multiple paths as they reach the street (or canyon floor). Figure 1 shows the uncorrected path of a vehicle while travelling around the same block several times using only GPS data.
By measuring the ‘time-of-flight’ from roadside units, additional location information can be fused with the GPS information to reduce the error and improve location estimates. But, while testing these technologies, an important consideration is the repeatability of vehicles tracking a path and returning to the same location, and the ability to verify accuracy.
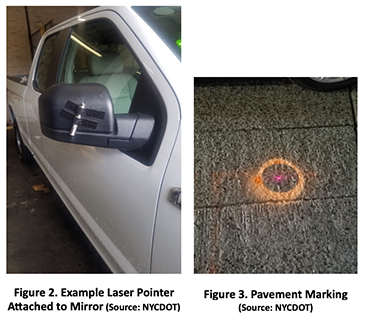
This repeatability was addressed using simple laser pointers, tape, and temporary-chalk spray paint (water-soluble). The laser pointers were temporarily attached to the mirrors and bumpers of each vehicle (as shown in Figure 2). With the vehicle at the stop bar, the chalk spray paint was used to mark the laser on the pavement (as shown in Figure 3). This enabled the driver to repeatedly align the vehicle at the stop bar each trip around the block when recording the location information.
Using this methodology, the NYCDOT CV Pilot team was able to verify the accuracy of the vehicle’s location using the time-of-flight information in combination with the GNSS data.
Using this data, the NYCDOT CV Pilot team was able to quantify the location differences between each run, measuring the deviations detected when the vehicle was located at the stop bar. The onboard unit’s internal location information was retrieved over several runs with the vehicle located at the same point each time. Figure 4 shows the vehicle path using the laser-pointer method describe above. The circles in Figure 4 indicate the data collected from the vehicles using the laser pointer at the marking location.



