An artificial intelligence (AI) model invented by researchers at the Massachusetts Institute of Technology (MIT) and Qatar Computing Research Institute (QCRI) that uses satellite imagery to tag road features in digital maps could help improve GPS navigation in places with limited data.
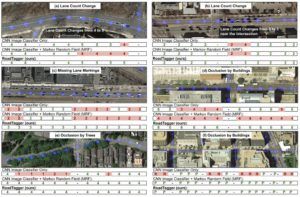
Creating detailed maps is an expensive, time-consuming process done mostly by big companies, such as Google, which sends camera-equipped vehicles out to capture video and images of an area’s roads. Combining that with other data can create accurate, up-to-date maps, but due to costs, some parts of the world are ignored. As they are easier to obtain and updated fairly regularly, a solution is to unleash machine-learning models on satellite images to automatically tag road features. However, roads can be occluded by trees, buildings, and other objects, making it a challenging task. The MIT and QCRI researchers have developed ‘RoadTagger’, which uses a combination of neural network architectures to automatically predict the number of lanes and road types (residential or highway) behind obstructions.
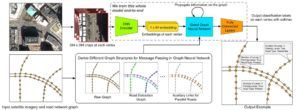
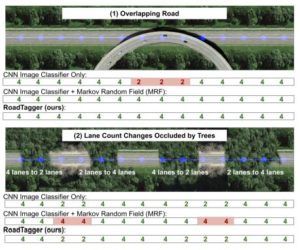 RoadTagger relies on a novel combination of a convolutional neural network (CNN), commonly used for image-processing tasks, and a graph neural network (GNN) that can model relationships between connected nodes in a graph and have become popular for analysing things like social networks and molecular dynamics. The ‘end-to-end’ model is fed only raw data and automatically produces output, without human intervention. The CNN takes raw satellite images of target roads and the GNN breaks the road into roughly 65 feet (20m) segments, or ‘tiles’. Each tile is a separate graph node, connected by lines along the road. For each node, the CNN extracts road features and shares that information with its immediate neighbours. Road information propagates along the whole graph, with each node receiving some information about road attributes in every other node. If a certain tile is occluded in an image, RoadTagger uses information from all tiles along the road to predict what is behind the occlusion.
RoadTagger relies on a novel combination of a convolutional neural network (CNN), commonly used for image-processing tasks, and a graph neural network (GNN) that can model relationships between connected nodes in a graph and have become popular for analysing things like social networks and molecular dynamics. The ‘end-to-end’ model is fed only raw data and automatically produces output, without human intervention. The CNN takes raw satellite images of target roads and the GNN breaks the road into roughly 65 feet (20m) segments, or ‘tiles’. Each tile is a separate graph node, connected by lines along the road. For each node, the CNN extracts road features and shares that information with its immediate neighbours. Road information propagates along the whole graph, with each node receiving some information about road attributes in every other node. If a certain tile is occluded in an image, RoadTagger uses information from all tiles along the road to predict what is behind the occlusion.
To train and test RoadTagger, the researchers used the OpenStreetMap real-world map dataset, which lets users edit and curate digital maps around the globe. From that dataset, they collected confirmed road attributes from 20 cities in the USA and then gathered the corresponding satellite images from a Google Maps dataset. In testing RoadTagger on occluded roads from digital maps of the US cities, the model counted lane numbers with 77% accuracy and inferred road types with 93% accuracy. The researchers are also planning to enable RoadTagger to predict other features, such as parking spots and bike lanes.
 “Most updated digital maps are from places that big companies care the most about. If you’re in places they don’t care about much, you’re at a disadvantage with respect to the quality of map,” said Sam Madden, a professor in MIT’s Department of Electrical Engineering and Computer Science (EECS) and a researcher in the Computer Science and Artificial Intelligence Laboratory (CSAIL). “Our goal is to automate the process of generating high-quality digital maps, so they can be available in any country. While visiting Qatar, we’ve had experiences where our Uber driver can’t figure out how to get where he’s going, because the map is so off. If navigation apps don’t have the right information, for things such as lane merging, this could be frustrating or worse.”
“Most updated digital maps are from places that big companies care the most about. If you’re in places they don’t care about much, you’re at a disadvantage with respect to the quality of map,” said Sam Madden, a professor in MIT’s Department of Electrical Engineering and Computer Science (EECS) and a researcher in the Computer Science and Artificial Intelligence Laboratory (CSAIL). “Our goal is to automate the process of generating high-quality digital maps, so they can be available in any country. While visiting Qatar, we’ve had experiences where our Uber driver can’t figure out how to get where he’s going, because the map is so off. If navigation apps don’t have the right information, for things such as lane merging, this could be frustrating or worse.”