


Autonomous vehicles (AV) trained using extreme one-in-a-million accident data and ‘near-miss’ scenarios can achieve a six-fold improvement on the detection of a collision risk posed by other road users compared to vehicles trained using traditional approaches.
That’s the finding of D-RISK, a co-innovation project part funded by the UK’s Centre for Connected and Autonomous Vehicles, comprising dRISK.ai, DG Cities, Claytex and Imperial College London.
Research conducted in the UK in February and March 2022 looked at millions of hours of footage from CCTVs and dashcams covering a wide variety of traffic conditions, hundreds of thousands of accident reports, and crowdsourced public stories of near-miss and one-in-a-million chance accident scenarios. It also included a NASA-inspired failure mode prediction technique designed to reveal rare incidents, or ‘edge’ cases, which would be easy for humans to negotiate but hard for AVs.
The repository was used to identify the cases weighted strongly towards the most unusual high-risk circumstances. D-RISK then used these to retrain the perceptual and control subsystems in AVs to deal with risky scenarios with greater accuracy.
The main finding is that AVs trained using extreme examples of accidents or ‘edge’ cases can achieve a six-fold improvement on the detection an incident or collision will occur compared to AVs trained using traditional accident data.
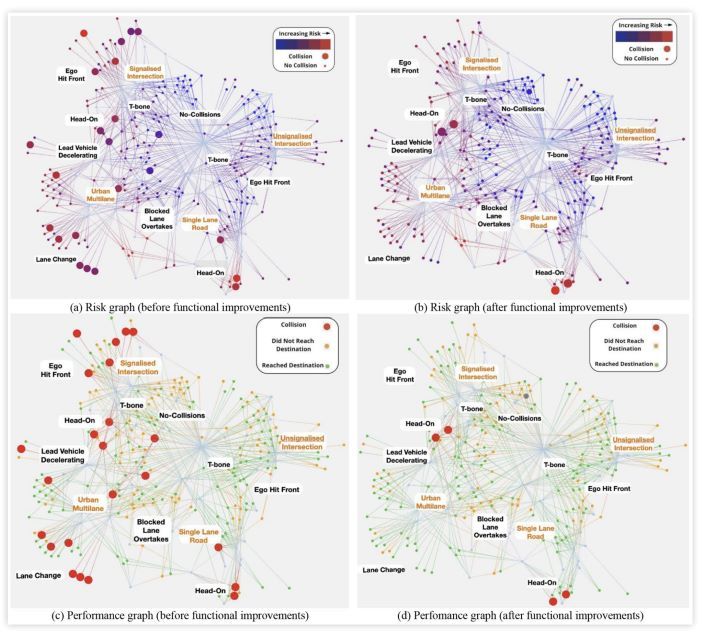
Other significant findings include evidence that AVs are twice as likely to be accurate in their detection of a collision risk without compromising performance on detecting other more frequent types of accident and can achieve a 20 times improvement on the ability to contend with highly difficult traffic conditions that would otherwise lead to serious or fatal accidents, without decreasing performance on handling everyday conditions.
The findings are summarised in a paper entitled “Virtual verification of decision making and motion planning functionalities for AVs in the urban edge case scenarios” which has been submitted and accepted by the Society for Automotive Engineers (SAE). The paper will help policy makers to understand what makes a driverless car fail safety standards.
“No deployment has yet been able to demonstrate this kind of accuracy when it comes to road safety,” says Chess Stetson, CEO at dRisk.ai. “To be commercially viable, driverless cars are going to have to deal with one-in-a-million edge cases — the complex, high-risk scenarios, which are individually unlikely but collectively make up the majority of risk. They include everything from poorly marked construction zones, abandoned vehicles, and oddly placed traffic cones to more extreme cases of wild animals in the road.

“This is a ground-breaking piece of research because these are the cases developers in labs don’t plan for, yet are critical for safety training. Collectively, these results point to a new way of developing highly versatile autonomous vehicles, which will be ready to achieve the safety and cost efficiency promise of driverless cars. Fundamentally, this is the sort of research regulators are asking for and need to see reflected in AV pilots, because it can help inform urban strategy, AV policy, insurance, safety standards and licencing.”
Images: dRisk.ai and Adobe Stock.


